Dragonfly拓扑简介
简介
Dragonfly是一种现在比较时髦的拓扑结构,它由John Kim等人在2008年的论文Technology-Driven, Highly-Scalable Dragonfly Topology中提出,它的特点是网络直径小、成本较低,对于高性能计算有着非常大的优势。现在已经被运用在使用Cray XC系列网络的各种超算中[1],如2017年11月排名第3的超算PIZ DAINT、2018年11月排名第6的超算TRINITY、2016年11月排名第5的超算CORI。未来也将要被应用在使用Slingshot网络的许多超算中,如:最新一期2021年6月排名第5的Perlmutter超算。
注[1]:由于部分超算升级过配置,这里列出的是其最高排名
ps. Dragonfly的中文直译是“蜻蜓”,并不是“飞龙”。我竟然“飞龙飞龙”地叫了两年才发现这玩意原来是“蜻蜓”,手动捂脸,英语都还给小学老师了
基本定义
一个简单的dragonfly网络如下图所示。
以下遵循John Kim等人在2008年的论文Technology-Driven, Highly-Scalable Dragonfly Topology和Md Shafayat Rahman等人在2019年的论文Topology-Custom UGAL Routing on Dragonfly中的记号表示法,有冲突的部分以严谨为准(以我为准),在大多数论文中也都采用的是这种记号表示法。
Dragonfly的拓扑结构分为三层[2]:Switch层[3],Group层,System层。
- Switch层:包括一个交换机,及其相连的 p 个计算节点
- Group层:包含 a 个Switch层,这 a 个Switch层的 a 个交换机是全连接(All-to-all)的,换言之,每个交换机都有 a-1 条链路连接分别连接到其他的 a-1 台交换机
- System层:包含 g 个Group层,这 g 个Group层也是全连接的
注[2]:在该论文中仅有2层
注[3]:在该论文中称之为Router层
对于单个switch交换机,它有p个端口连接到了计算节点,a-1个端口连接到Group内其他交换机,h个端口连接到其他Group的交换机
因此,我们可以计算得到网络中的如下属性
- 每个交换机的端口数为 k=p+(a-1)+h
- Group的数量为 g=ah+1
- 网络中一共有 N=ap(ah+1) 个计算节点
- 如果我们把一个Group内的交换机都合成一个,将它们视为一个交换机,那么这个交换机的端口数为 k‘=a(p+h)
在一个较小规模的网络中, g=ah+1 个group可能会较多,可以将任意两个Group之间的连接数由一条增加为多条,这样任意两个Group之间就有 floor((ah+1)/g) 条链路连接。
不难发现,在确定了 p,a,h,g 四个参数之后我们就可以确定一个dragonfly的拓扑,因此一个Dragonfly的拓扑可以用 dfly(p,a,h,g) 来表示
一种推荐的较为平衡的配置是方法是:a=2p=2h
使用高阶交换机(端口数较多的交换机)对于提升网络中能容纳的节点数有很大帮助,使用上述的平衡的配置方法,交换机的端口数和网络中能容纳的最大节点数量如下所示

参考文献:
网络变形
Cray XC Series Network (Cascade)
【Cray XC 系列】是Cray公司参与美国国防部高级研究计划局(DARPA)高性能计算系统(HPCS)项目的一部分而开发的一系列超算(distributed memory system)。代号为“Cascade”,注意这是这个系列的一个代号,在一些论文里经常会看到“Cascade System”,这并不是指一个叫“Cascade”的超算(虽然确实有叫这个名字的超算,不过它用的网络并不是这里要介绍的网络)。
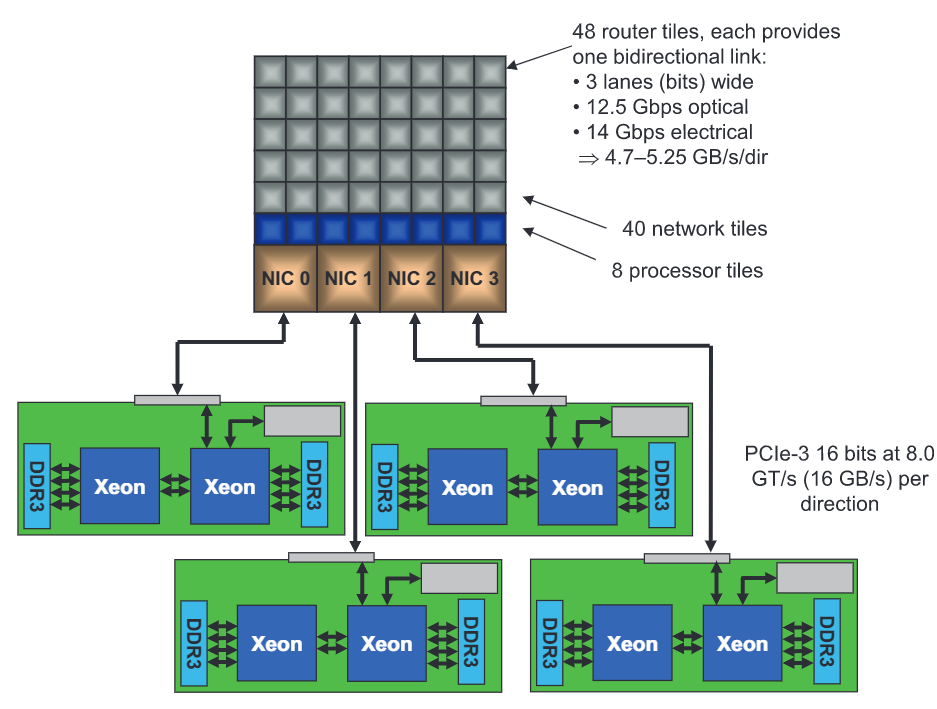
Aries ASIC是这个系列网络中的网络芯片,由台积电40nm工艺制造,可以把它视为4个张网卡芯片和1个48口交换机芯缝合到了一个芯片上,如下图所示。它的48个端口其中8个端口为一个刀片上的4个计算节点(每个计算节点两个端口)提供网络。
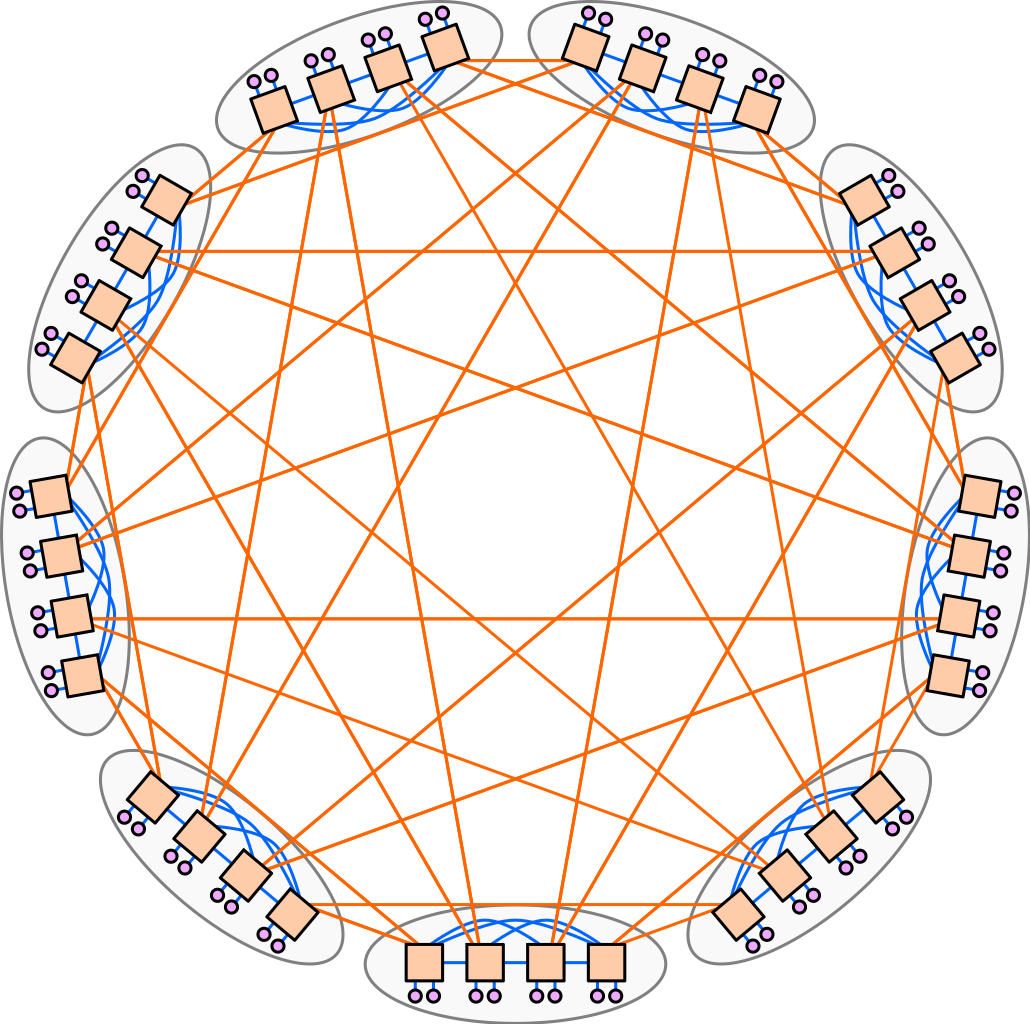
它的网络拓扑将Dragonfly进行了改进,为了方便理解,我将它分为了4层:Switch层、Chassis层、Group层、System层
- Switch层:如前面所说的,一个Switch层有1个Aries ASIC和4个计算节点,物理上是一个刀片式结构
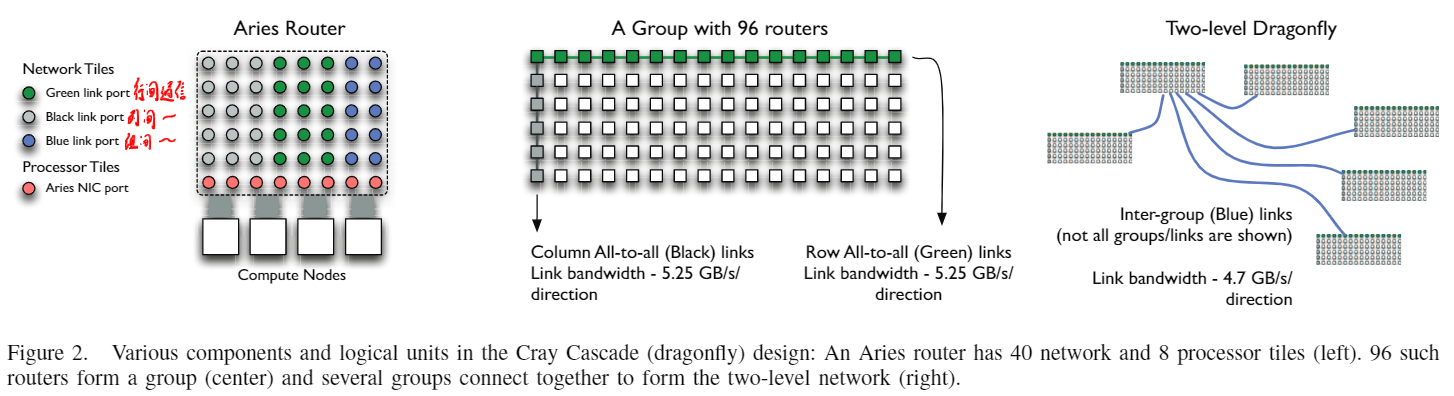
- Chassis层:由一个机架内的16个Switch层构成,并且是全连接(All-to-all)的,物理上通过背板连接的,这些连接使用绿色表示
- Group层:由6个机架内测6个Chassis层构成,并且是全连接(All-to-all)的,物理上是通过铜缆连接的,这些连接使用黑色表示
- System层:最多可以由241个Group层组成,并且是全连接(All-to-all)的,每两个Group之间有4条链路,物理上通过光纤连接,这些连接适用蓝色表示
参考文献:
Cray Cascade: A scalable HPC system based on a Dragonfly network
Maximizing Throughput on a Dragonfly Network
Analyzing Network Health and Congestion in Dragonfly-Based Supercomputers
PERCS
这个是我能找到的Dragonfly在真实大规模系统上的使用虽然在该论文中并没有直接说它是Dragonfly,但是实际上就是的。是一个比较标准的Dragonfly,讲道理不应该放在“网络变形”这一节,但是其他地方感觉有点怪怪的,并且这个东西在很多论文中都出现了,删了也不太好,所以就放在这一节了。详细信息见文献(我也没太仔细看)。
参考文献:
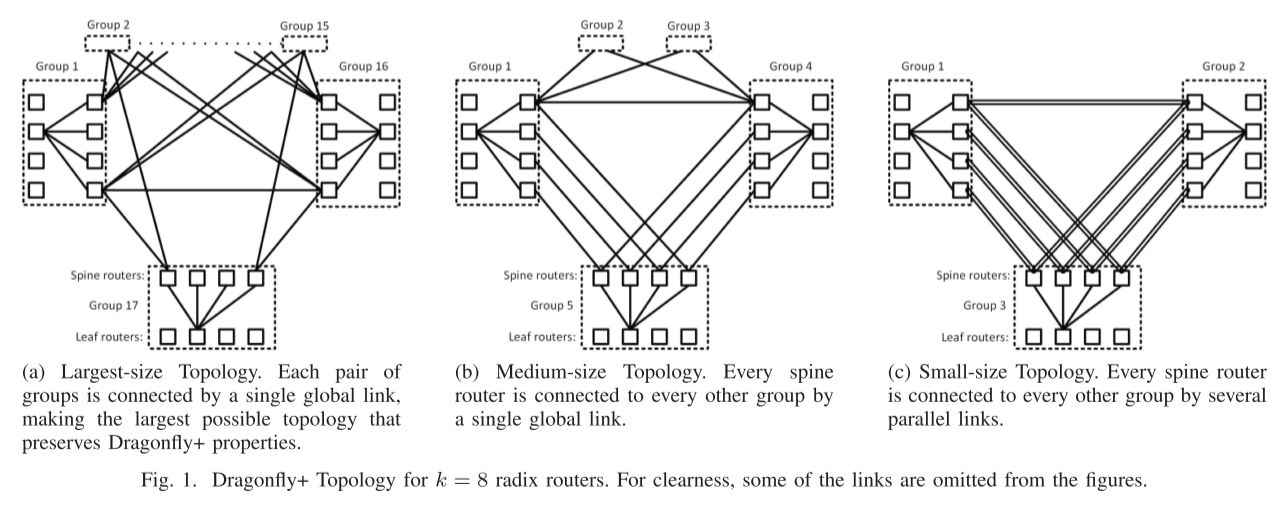
Dragonfly+
Dragonfly的一个变种,将group内的通信变为了fat-tree
参考文献:
TODO
可能还有其他的一些变形,日后会补充
Deadlock Free
在Dragonfly中,如果使用最短路由,需要2个VC来避免死锁;如果使用非最短路由,需要3个VC来避免死锁。

这一部分如果看不懂的话可以去看一下Principles and Practices of Interconnection Networks这本书第十四章,或者看我另一篇博客《[Virtual Channel与Flow Control与Deadlock](http://blog.sysu.tech/网络/Virtual Channel与Flow Control与Deadlock/)》,这里有对死锁,包括Dragonfly上的死锁问题的更详细的说明。
路由
这一节介绍Dragonfly中的一些路由种类,主要是主要根据论文Technology-Driven, Highly-Scalable Dragonfly Topology中的工作来介绍,其他的一些论文中的创新会明确指出。注意,下面介绍的是在最朴素的Dragonfly网络,即“基本定义”一节中的拓扑定义,暂不讨论各种变种Dragonfly拓扑中的定义。因此下面提到的 Global Link 指Group之间的连接,Local Link 指同一个Group内交换机之间的连接。
Minimal Routing:最短路径的路由,简写为MIN。由于拓扑的性质,Minimal Routing中最多只会有1条Global Link和2条Local Link,也就是说最多3跳即可到达。在任由两个Group之间只有一条直连连接时(即g=ah+1时),最短路只有一条。
Non-Minimal Routing:非最短路径的路由,可以简写为Non-Min,来自论文A scheme for fast parallel communication。有的地方叫Valiant algorithm,简写为VAL,还有的地方叫Valiant Load-balanced routing,简写为VLB。随机选择一个Group,先发到这个Group然后再发到目的地。由于拓扑的性质,VAL最多会经过2条Global Link和3条Local Link,最多5跳即可到达。(这里我也有疑问:①如果随机到的Group就是源节点或者目的节点所在的Group,那不依然是最短路径路由?这样应该叫:Maybe Non-Minimal Routing:可能非最短路径的路由。②如果源节点和目的节点在一个Group,那还要这样绕一圈再回来吗?不过这些问题并不重要,不要放在心上)
Universal Globally-Adaptive Load-balanced(UGAL):全局自适应负载均衡路由,来自论文Load-Balanced Routing in Interconnection Networks。当一个数据包到达交换机时,交换机根据 最短路径路由MIN 和 非最短路径的路由VAL 的 路径上所有交换机队列的排队长度的和,来选择路由,见下方公式。
$$
TQ_{MIN} ≤ TQ_{VLB} +T
$$
其中 TQMIN 表示:最短路径路由MIN 的 路径上所有交换机队列的排队长度的和; TQVLB 表示:非最短路径的路由VAL 的 路径上所有交换机队列的排队长度的和。T 是一个偏移量,当想要手动偏向于使用者两种路由中的某一个时可以修改这个值
因为要获取到全局网络状态信息太难了,所以提出了一系列变种,在Dragonfly中有如下若干种实现方式:
UGAL-G:只根据发送节点所在的Group的所有交换机的队列排队长度来进行判断。但是要实现这个依然很难,也是一个非常理想的情况。
UGAL-L:只根据本地交换机的队列排队长度来进行判断,这种方式会产生一个问题:当在源Group中进行路由时,如果最短路径和非最短路径都要经过源Group中另一个交换机时,此时这两条路径的出口队列一致,因此总是会选择最短路径。
UGAL-LVC:针对UGAL-L的问题进行了一点改进:将最短路径和非最短路径分为两个VC,分别排队来计算长度。但是这样又会导致数据包更偏向选择非最短路由,导致在均匀流量模式下性能不好。
UGAL-LVC_H:针对UGAL-LVC的问题又进行了一点改进:只有在MIN和VAL的输出端口不一样的时候,才用VC的队列长度来进行判断,否则还是直接使用队列长度来判断。
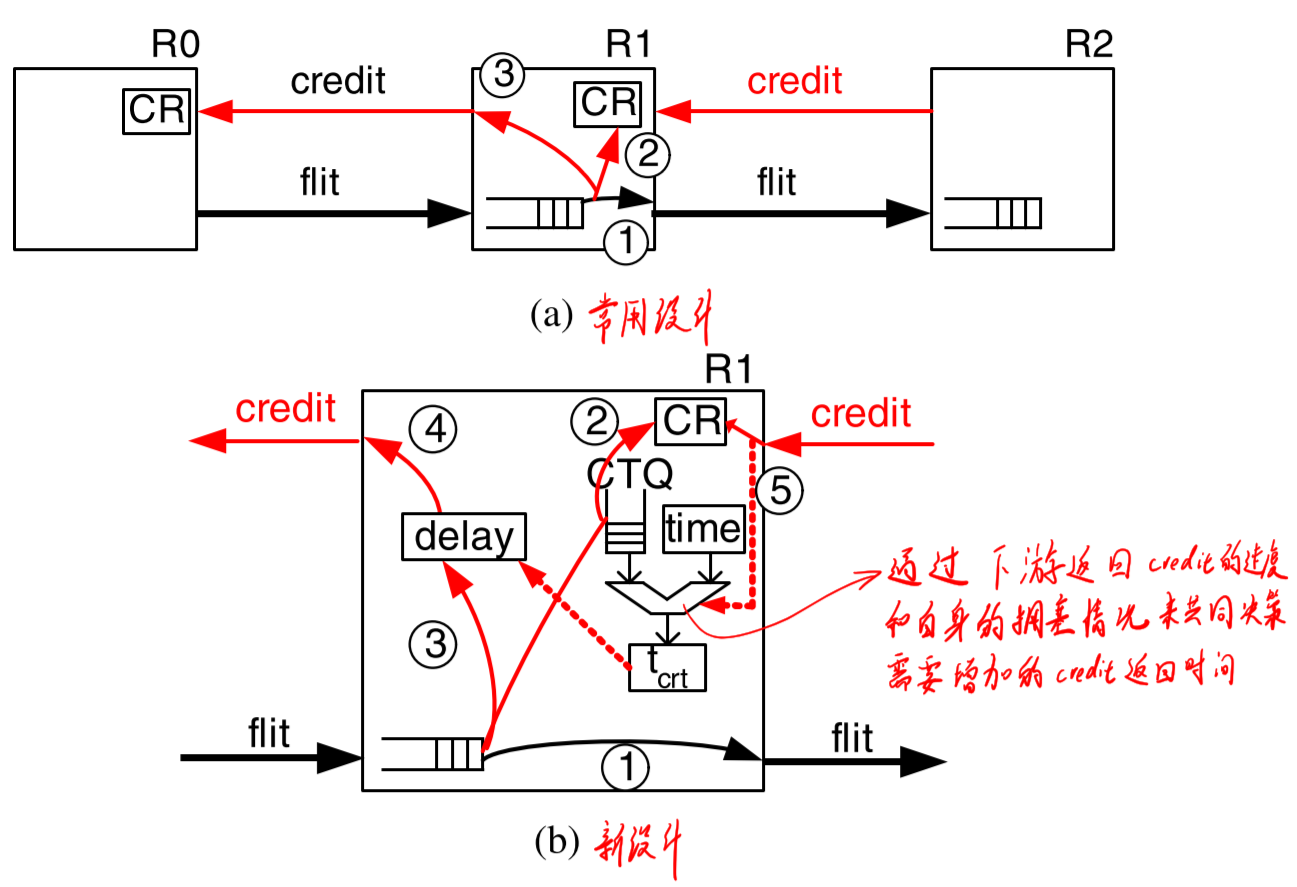
UGAL-LCR:由于只用本地信息来判断拥塞,在buffer越大时反而造成的延迟越大,因为buffer被填满了之后,上游的交换机才能通过没有credit了感知到。为了克服这个问题,可以通过当前拥塞情况主动增加credit的返回延迟,上游交换机认为返回credit越快的交换机拥塞程度越小。
在具体的实现上,Cray Cascade使用了4条VC,在路由时会选择2条最短路(MIN),2条非最短路(Non-Min),然后根据负载情况来进行选择。
后面也还有一些工作继续对路由算法进行优化
- progressive adaptive routing (PAR):依然是根据本地信息来决策走最短路径还是非最短路径,但是消息在出源节点所在的group之前,可以修改策略,中途改走非最短路径;如果已经决定走非最短路径,则中间不可更改。
- T-UGAL、T-PAR:像刚刚提到的Cray Cascade,在自适应路由选择路径的时候并不是所有可行路径都进行比较的,是要从一个样本空间进行抽样的,这个样本空间一般就是全体路径,这篇工作就是把这个样本空间缩小了,至于是怎么缩小的,有两个出发点:①样本空间缩小不能降低太多网络的吞吐量;②要保证各种链路的负载相对均衡。
什么?你问哪个性能最好?当然是动态路由大法好!
参考文献:
Technology-Driven, Highly-Scalable Dragonfly Topology
Topology-Custom UGAL Routing on Dragonfly
A scheme for fast parallel communication(这篇我没看)
Load-Balanced Routing in Interconnection Networks(这篇我也没看)
Cray Cascade: a Scalable HPC System based on a Dragonfly Network
Indirect adaptive routing on large scale interconnection networks
作业调度
这是比较反直觉的一点:一般来说在其他的拓扑如Fat-tree和Torus中,给一个作业分配的节点,一般来说放得进一点有助于通信,可以提高性能。而在Dragonfly中恰恰想法,将一个作业的各个节点分散在各个Group中反而有助于提升通信性能。这是因为两个Group之间的直连链路是很少的,如果两个Group之间有多个节点对需要进行通信,就很容易会导致直连链路饱和,就需要经过其他Group来进行中转,性能就下降了,因此将同一个作业的节点都集中在几个Group中容易导致性能下降。

参考文献:
Analyzing Network Health and Congestion in Dragonfly-Based Supercomputers
Maximizing Throughput on a Dragonfly Network
还有些我一时间找不着了,啊,好困,遇上了再补充叭~TODO
MPI Collective通信算法
优秀的拓扑自然需要优秀的MPI Collective通信算法来充分发挥它的性能,下面介绍一些相关的工作。
Collectives on Two-Tier Direct Networks
中根据Dragonfly的层次架构来对Scatter、Gather、Broadcast、Allgather、Reduce、Allreduce来进行了设计,主要的思想基本是:
- 利用同一个Group中的其他节点来同时对其他Group节点进行通信,来提升吞吐量。(LLF: Local Link First)
- 只对同一个Group中的一个节点进行通信,由这一个节点再和通一个Group中的其他节点进行通信,来大大减少Group之间的通信量。(GLF: Global Link First)
但是我觉得这篇工作有一些缺陷:
- 只针对了大数据包的操作进行了优化;
- 文中假设全系统中所有节点都参与;
- 文中假设所有节点都同时开始通信,没有考虑imbalance的情况
Evaluation of Topology-Aware Broadcast Algorithms for Dragonfly Networks
中把前一个工作中存在的问题②在Bcast算法中优化了,只在LLF算法上做了一点点非常小的改变:在广播到同一个Group内的其他节点之后,原来是依次地再广播到其他的Group,作者改成了在这一步再构造多棵Binomial Tree来进行广播到其他Group。
使得性能在各种场景下都能较为均衡(并没有显著提升,但是各种场景下都不差)。这篇文章亮点是实验做得很严谨全面。
Design and Evaluation of Topology-aware Scatter and AllGather Algorithms for Dragonfly Networks
这篇似乎只是SC16上的一个poster,只找到了一个2页的短篇论文,似乎没有完整的论文?(这个短篇论文我看得云里雾里的,直接只看poster反而懂了)
他用CODES模拟器观察了Dragonfly网络拓扑下Scatter和Allgather的一些算法的性能
- 针对Allgather算法:他们把原来的Ring算法改成了一个Topology Aware Ring算法,在数据包大小大于2KB时可以提升性能
- 针对Scatter算法:他们比较了四种算法:传统的Binomial TREE,直接分发的LIN,以及前面提到的LLF和GLF。发现在各种情况下都是LIN最快,因为LIN不容易引起网络中的拥塞。
我觉得这个工作再次证明了:在Dragonfly中很多东西的设计是挺反直觉的,经常在意料之外,但也在情理之中。